
ASK THE COACH
 02-23-2017, 06:08 PM
02-23-2017, 06:08 PM
#2776
I guess I'm not supposed to post a link to the video, but I can probably answer questions if anyone has any. If not you can contact me through private message. Either way, hope you guys liked it.
 02-23-2017, 11:23 PM
02-23-2017, 11:23 PM
#2778
Rennlist
Basic Site Sponsor
Basic Site Sponsor
Join Date: Jun 2008
Location: Durham, NC and Virginia International Raceway
Posts: 19,052
Received 3,192 Likes
on
1,841 Posts
I think Manifold beat you to it! 
__________________
-Peter Krause
www.peterkrause.net
www.gofasternow.com
"Combining the Art and Science of Driving Fast!"
Specializing in Professional, Private Driver Performance Evaluation and Optimization
Consultation Available Remotely and at VIRginia International Raceway
-Peter Krause
www.peterkrause.net
www.gofasternow.com
"Combining the Art and Science of Driving Fast!"
Specializing in Professional, Private Driver Performance Evaluation and Optimization
Consultation Available Remotely and at VIRginia International Raceway
02-26-2017, 09:16 AM
#2779
Rennlist Member
I've watched that video 2 or 3 times now and it really hammers home some concepts I've been working through -- Vmin versus time to full throttle in particular. The most interesting idea/approach for me was looking at corner exit speeds by time instead of by distance to judge the ultimate result.
For example, for me at Summit Point Main I've been working on corner 10 and there are good laps with 2-3 mph differences in Vmin and virtually identical exit speeds, but I haven't ever looked at the exit speeds as a function of the time from corner entry, only by distance. I need to go back and look at the speed 4 or 5 (or whatever) seconds from corner entry and see, I think.
Really good stuff. Off to buy some books. Anyone (via PM or otherwise ) have advice on which of the three to read first?
) have advice on which of the three to read first?
For example, for me at Summit Point Main I've been working on corner 10 and there are good laps with 2-3 mph differences in Vmin and virtually identical exit speeds, but I haven't ever looked at the exit speeds as a function of the time from corner entry, only by distance. I need to go back and look at the speed 4 or 5 (or whatever) seconds from corner entry and see, I think.
Really good stuff. Off to buy some books. Anyone (via PM or otherwise
) have advice on which of the three to read first?
02-26-2017, 04:47 PM
#2781
Rennlist Member
Join Date: May 2012
Location: Mid-Atlantic (on land, not in the middle of the ocean)
Posts: 13,037
Received 4,355 Likes
on
2,479 Posts
I've watched that video 2 or 3 times now and it really hammers home some concepts I've been working through -- Vmin versus time to full throttle in particular. The most interesting idea/approach for me was looking at corner exit speeds by time instead of by distance to judge the ultimate result.
For example, for me at Summit Point Main I've been working on corner 10 and there are good laps with 2-3 mph differences in Vmin and virtually identical exit speeds, but I haven't ever looked at the exit speeds as a function of the time from corner entry, only by distance. I need to go back and look at the speed 4 or 5 (or whatever) seconds from corner entry and see, I think.
Really good stuff. Off to buy some books. Anyone (via PM or otherwise ) have advice on which of the three to read first?
For example, for me at Summit Point Main I've been working on corner 10 and there are good laps with 2-3 mph differences in Vmin and virtually identical exit speeds, but I haven't ever looked at the exit speeds as a function of the time from corner entry, only by distance. I need to go back and look at the speed 4 or 5 (or whatever) seconds from corner entry and see, I think.
Really good stuff. Off to buy some books. Anyone (via PM or otherwise
) have advice on which of the three to read first?I suggest reading all three books in the order listed here, expecting to read them multiple times:
02-28-2017, 09:17 PM
#2782
Was reading back through the thread and wanted to add some here. The penalty for missing the apex a certain amount of feet compared to corner exit or entry depends on the angle of the corner. For example if you miss the apex in a hairpin by a foot you only add 2 feet of track distance, but you didn't change the corner radius any. That's why missing the apex in a hairpin is not such a big deal. Missing the entrance hurts more in a hairpin for lower powered cars that need a circular exit however as they need that apex speed. Higher acceleration cars will have less of a penalty.
In a faster corner however, missing the apex or entry directly affects the radius of the corner so it creates more of a penalty. Missing the apex is worse though as it will tighten the radius more. Visualize how much tighter a corner would be if you miss the apex by half a track width vs miss the entry by half a track width.
This is really just all for food for thought though. Reaching the correct apex at the right speed and angle is the hard part. Starting the corner near the edge of the track is easy.
In a faster corner however, missing the apex or entry directly affects the radius of the corner so it creates more of a penalty. Missing the apex is worse though as it will tighten the radius more. Visualize how much tighter a corner would be if you miss the apex by half a track width vs miss the entry by half a track width.
This is really just all for food for thought though. Reaching the correct apex at the right speed and angle is the hard part. Starting the corner near the edge of the track is easy.
"Give me a while to compose a more detailed response, but you butt is not lying to you. Entry point accuracy ALWAYS takes second fiddle to apex accuracy. Apex accuracy ALWAYS takes priority, period. Think about how long you're turning through a corner, think about how long it takes before you can go back to power (WOT power). "
Thanks for your response. The traditional way that line theory (or cornering theory or whatever you want to call it) has been taught is that the entry is just as important as every other part of the corner. However, it just doesn't feel that way.
I think the idea is that being 3 feet in from the edge of the track is just as bad as missing the apex by 3 feet because either way you are changing the radius of the corner by the same amount. I'm not sure if this is true though, and like you said, it just doesn't feel like it.
Maybe the apex has a bigger effect on the radius? I can't picture it in my head.
I often see pro drivers not always using all the track on the entry (and not just for bumps or other pavement issues), but seeing them missing an apex is clearly a mistake.
Thanks for your response. The traditional way that line theory (or cornering theory or whatever you want to call it) has been taught is that the entry is just as important as every other part of the corner. However, it just doesn't feel that way.
I think the idea is that being 3 feet in from the edge of the track is just as bad as missing the apex by 3 feet because either way you are changing the radius of the corner by the same amount. I'm not sure if this is true though, and like you said, it just doesn't feel like it.
Maybe the apex has a bigger effect on the radius? I can't picture it in my head.
I often see pro drivers not always using all the track on the entry (and not just for bumps or other pavement issues), but seeing them missing an apex is clearly a mistake.
03-01-2017, 11:32 AM
#2783
I was writing a message to someone, but it had a word limit so I figured I would just put it here since it's just some thought experiments. Maybe some others enjoy these.
Imagine two lines. A vehicle has to start at one, cross the other and then come back as quickly as possible.
What if you had a vehicle that could generate max force in any direction at any time. To get back as quickly as possible all force would be in one singular direction. The line would be straight out and back. You could think of the path as having an infinite radius.
Now imagine a vehicle that had no ability to decelerate or accelerate and could only alter its lateral force. Something like a car with no brakes and the throttle stuck partially open. It would start a circular path from the the first line that would reach 90 degrees right at the second line. The force it generated would be moving it toward the center of the circle it was driving on and its radius would be constant. This would create the greatest net force pushing it backwards toward the start line.
Both of these would be ideal for those vehicles, but neither would be a spiral. A path of shrinking radius is simply the result of a vehicle that can generate force in multiple directions. The actual rate of radius change would be determined by the force the car generates in different directions. It's maximizing the force in the ideal directions that matters though.
Try this one. What if you had a car that could generate force in all directions equally, but must accelerate forward. In other words, you couldn't just head toward the line and slam it in reverse and head back in a straight line. Something like 4 wheel drive with unlimited horsepower. What would be the ideal path? How wide would should it go?
Imagine two lines. A vehicle has to start at one, cross the other and then come back as quickly as possible.
What if you had a vehicle that could generate max force in any direction at any time. To get back as quickly as possible all force would be in one singular direction. The line would be straight out and back. You could think of the path as having an infinite radius.
Now imagine a vehicle that had no ability to decelerate or accelerate and could only alter its lateral force. Something like a car with no brakes and the throttle stuck partially open. It would start a circular path from the the first line that would reach 90 degrees right at the second line. The force it generated would be moving it toward the center of the circle it was driving on and its radius would be constant. This would create the greatest net force pushing it backwards toward the start line.
Both of these would be ideal for those vehicles, but neither would be a spiral. A path of shrinking radius is simply the result of a vehicle that can generate force in multiple directions. The actual rate of radius change would be determined by the force the car generates in different directions. It's maximizing the force in the ideal directions that matters though.
Try this one. What if you had a car that could generate force in all directions equally, but must accelerate forward. In other words, you couldn't just head toward the line and slam it in reverse and head back in a straight line. Something like 4 wheel drive with unlimited horsepower. What would be the ideal path? How wide would should it go?
03-02-2017, 06:11 AM
#2784
I was writing a message to someone, but it had a word limit so I figured I would just put it here since it's just some thought experiments. Maybe some others enjoy these.
Imagine two lines. A vehicle has to start at one, cross the other and then come back as quickly as possible.
What if you had a vehicle that could generate max force in any direction at any time. To get back as quickly as possible all force would be in one singular direction. The line would be straight out and back. You could think of the path as having an infinite radius.
Now imagine a vehicle that had no ability to decelerate or accelerate and could only alter its lateral force. Something like a car with no brakes and the throttle stuck partially open. It would start a circular path from the the first line that would reach 90 degrees right at the second line. The force it generated would be moving it toward the center of the circle it was driving on and its radius would be constant. This would create the greatest net force pushing it backwards toward the start line.
Both of these would be ideal for those vehicles, but neither would be a spiral. A path of shrinking radius is simply the result of a vehicle that can generate force in multiple directions. The actual rate of radius change would be determined by the force the car generates in different directions. It's maximizing the force in the ideal directions that matters though.
Try this one. What if you had a car that could generate force in all directions equally, but must accelerate forward. In other words, you couldn't just head toward the line and slam it in reverse and head back in a straight line. Something like 4 wheel drive with unlimited horsepower. What would be the ideal path? How wide would should it go?
Imagine two lines. A vehicle has to start at one, cross the other and then come back as quickly as possible.
What if you had a vehicle that could generate max force in any direction at any time. To get back as quickly as possible all force would be in one singular direction. The line would be straight out and back. You could think of the path as having an infinite radius.
Now imagine a vehicle that had no ability to decelerate or accelerate and could only alter its lateral force. Something like a car with no brakes and the throttle stuck partially open. It would start a circular path from the the first line that would reach 90 degrees right at the second line. The force it generated would be moving it toward the center of the circle it was driving on and its radius would be constant. This would create the greatest net force pushing it backwards toward the start line.
Both of these would be ideal for those vehicles, but neither would be a spiral. A path of shrinking radius is simply the result of a vehicle that can generate force in multiple directions. The actual rate of radius change would be determined by the force the car generates in different directions. It's maximizing the force in the ideal directions that matters though.
Try this one. What if you had a car that could generate force in all directions equally, but must accelerate forward. In other words, you couldn't just head toward the line and slam it in reverse and head back in a straight line. Something like 4 wheel drive with unlimited horsepower. What would be the ideal path? How wide would should it go?
Although by 'must accelerate forward' I'll admit to not being entirely sure if you mean:
1. Throughout the whole manouver its forwards speed (eg measured relative to an imaginary reference grid or simply just any point on the surface on which those two parallel lines are fixed) along its primary longitudinal axis must keep increasing. Or more basically put, just never coming off the gas pedal throughout the whole 'there and back' trip that takes it from the starting line to the other line and back.
or else:
2. The car is allowed to slow or even stop at any point during the manouver, but may never travel backwards. (which is what I suspect you mean).
Starting with the more unlikely Case 1 scenario, with a mandated stationary start and flying finish, and a car with significant mass, if that required forward acceleration was constant then something like a reverse 'bullet' ogive would be my best initial guess (think the reverse trajectory of a mortar shell that lands - or in the car's "reversed-ogive" case, launches - as close to perpendicular as possible to the first line so as to touch but not overshoot that second line before coming back to line one a much greater distance away. The less mass and rotational inertia this car had relative to its power, the more that would then bring its ideal path closer back to your first "straight there + straight back" answer (and ultimately just exactly that straight line, with an infinite power to weight ratio: like a photon ricocheting back off a mirror).
In Case 2 (the more likely "just no reversing the car is allowed"), and the car had to start from a dead stop and finish at a dead stop at whatever two points it wanted on line 1 - without overshooting either line - I'm picking the ideal path would be a parabola, with that again converging back to that same straight line as power to weight ratio increases. Off course if those parallel lines happened to be less than the cars turning circle radius apart - say, only 6 feet between them - and I wasn't allowed to overshoot either line I might instead go with a sinusoidal wave (if allowed a moving start and finish on line one) which would largely save having to rotate the car 180 degrees, or otherwise do whatever line is generated by a scandi flick and a handbrake!
Can't help thinking this stuff needs diagrams really, but sleep calls. Thanks again for that vid Adam (and Matt for the assist)!

Last edited by 996tnz; 03-02-2017 at 09:05 AM.
03-02-2017, 09:10 AM
#2785
It was case 2 I meant. You just can't reverse the car. Let's also assume the tires are terrible at high slip angles so no hand brake turns. You can pass the 1st line at whatever speed you wish in both directions and we'll say the lines are 100 meters apart. I think I saw the answer in there, but not sure.
Let's say point A is where the car passes the first line initially and point B is where it passes it on the return. How far apart are the two points (ballpark figure, I'm mainly looking for the reasoning here, not an exact number), and at what angle would the car pass these two points?
Let's say point A is where the car passes the first line initially and point B is where it passes it on the return. How far apart are the two points (ballpark figure, I'm mainly looking for the reasoning here, not an exact number), and at what angle would the car pass these two points?
03-02-2017, 10:22 AM
#2786

There is a new version of the video posted yesterday:
03-02-2017, 04:30 PM
#2788
It was case 2 I meant. You just can't reverse the car. Let's also assume the tires are terrible at high slip angles so no hand brake turns. You can pass the 1st line at whatever speed you wish in both directions and we'll say the lines are 100 meters apart. I think I saw the answer in there, but not sure.
Let's say point A is where the car passes the first line initially and point B is where it passes it on the return. How far apart are the two points (ballpark figure, I'm mainly looking for the reasoning here, not an exact number), and at what angle would the car pass these two points?
Let's say point A is where the car passes the first line initially and point B is where it passes it on the return. How far apart are the two points (ballpark figure, I'm mainly looking for the reasoning here, not an exact number), and at what angle would the car pass these two points?
Since I have no ambition to revisit any ancient calculus homework, I'd probably find your requested difference between the start and finish crossing points on line 1 by finding a curve set and scaling it out on graph paper. Or I could use Google to do more than just find synonyms, but where's the fun in that? But the above is the gut-feel emergency answer I'd scribble down if I was running out of time on an exam and not allowed to just draw that 'golden spiral' based path.
The above technically assumes the total accelerative potential of the vehicle remains constant throughout the journey (think say a net 1G, but in any direction). Which would also mean nothing like air resistance, transmission ratio changes, variable transmission losses etc unless some system is actively cancelling out such effects.
But in practice, at the speeds likely to be reached with the lines 100 meters apart, those considerations shouldn't alter the ideal path too much anyway so your thought experiment should stilll carry quite nicely over to the track.
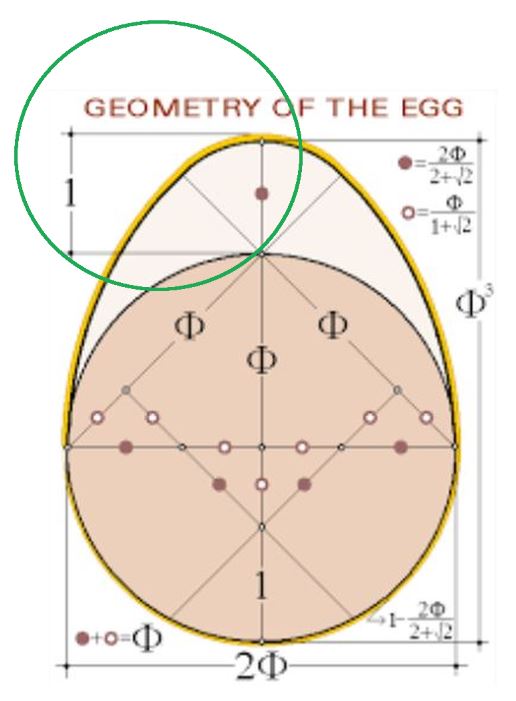
Having got this far along, I finally googled "golden spiral parabola', clicked on 'Images' and rather liked the look of them (think pointy end of an egg):
 03-02-2017, 09:36 PM
03-02-2017, 09:36 PM
#2789
On looking at that egg diagram above, it occurred to me that finding those crossing angles you wanted might involve something along the lines of drawing a circle (at least for your uniform G in any direction thought experiment example), centred on the apex, and sized relative to something like the ratio of the cars accelerative power (its uniform G maximum for instance in any direction) to its initial entry speed crossing line 1 (which will exactly match its exit speed if its G capabillity given the above uniformity across all directions). This would generate increasingly larger circles as entry speed dropped and/or accelerative capability increased. I would expect the circles to get bigger as the cars accelerative capability to entry speed ratio, asymptoting towards a circle that intercepts the legs of the 'golden arch' at the points where that transect line as shown cutting across the 'egg' meets them. If valid, that would mean a car with infinite accelerative ability relative to its entry speed would launch and return at exactly 90 degrees to the start line (ie that straight there, straight back case you presented as your first example), which makes intuitive sense.
The weaker the cars uniform accelerative ability relative to its entry speed, the smaller the circle, with its intercept now identifying a shallower entry/exit angle as being optimal (see crossing points of the smaller circles below). This also makes intuitive sense as a car travelling fast with little turning or braking ability can only avoid overshooting the apex by taking a much flatter trajectory.
I'm sure I'm off in some or most of those details of ratios, log functions and reference points but I'm hoping that I'm not too far off track conceptually?
Here's that same diagram again, but marked up to illustrate the basics of what I'm playing with above:
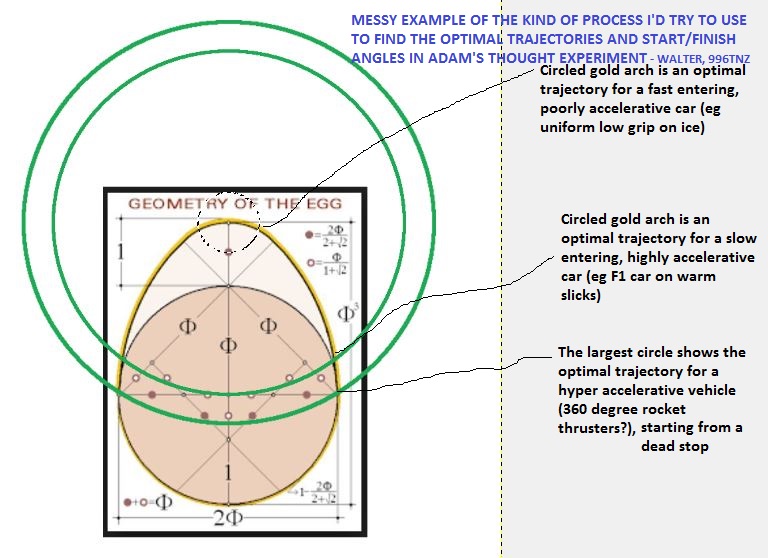
Am I getting any warmer Adam? - Cheers, Walt
The weaker the cars uniform accelerative ability relative to its entry speed, the smaller the circle, with its intercept now identifying a shallower entry/exit angle as being optimal (see crossing points of the smaller circles below). This also makes intuitive sense as a car travelling fast with little turning or braking ability can only avoid overshooting the apex by taking a much flatter trajectory.
I'm sure I'm off in some or most of those details of ratios, log functions and reference points but I'm hoping that I'm not too far off track conceptually?
Here's that same diagram again, but marked up to illustrate the basics of what I'm playing with above:
Am I getting any warmer Adam? - Cheers, Walt
Last edited by 996tnz; 03-03-2017 at 12:32 AM.
03-03-2017, 12:00 AM
#2790
Just realised "Golden arch egg racing" may even suggest optimal lines for more complicated corners involving "fast in, slow out", or else "slow in, fast out" strategies. If driving the identified curves left to right (ie clockwise), displacing the circle left might find an example of a "fast in, slow out" line? And displacing it to the right, a "slow in, fast out" line? After those identified sections are suitable rotated to again touch your 'Line 1' start-finish line of course. Here is one "fast in, slow out" version as an example:
I hope I'm not TOO far off base here with this stuff Adam, as I've just noticed this is all in the Rennlist treasure trove that is the "Ask the Coach" thread. Last thing I want to do is misdirect anyone, even accidentally, so I'm putting the eggs away now.
I hope I'm not TOO far off base here with this stuff Adam, as I've just noticed this is all in the Rennlist treasure trove that is the "Ask the Coach" thread. Last thing I want to do is misdirect anyone, even accidentally, so I'm putting the eggs away now.
Last edited by 996tnz; 03-03-2017 at 01:02 AM.