When you click on links to various merchants on this site and make a purchase, this can result in this site earning a commission. Affiliate programs and affiliations include, but are not limited to, the eBay Partner Network.
Oversteer calc - 997 St_wheel position to front wheel angle ratio
I am experimenting with math channels and calculating over/understeer.
Most methods compute an actual turn angle (e.g., from speed and lateral_g) and then compare to sensor steering wheel position.
Trouble is, my 997 has variable ratio steering so the ECU steering wheel position variable does not have a linear relationship to actual front wheel turn in angle. This throws everything off.
Anyone solve this problem or have an alternate method?
I am experimenting with math channels and calculating over/understeer.
Most methods compute an actual turn angle (e.g., from speed and lateral_g) and then compare to sensor steering wheel position.
Trouble is, my 997 has variable ratio steering so the ECU steering wheel position variable does not have a linear relationship to actual front wheel turn in angle. This throws everything off.
Anyone solve this problem or have an alternate method?
Use turn plates, create a math channel and use "steered angle" instead of "steering (wheel) angle."
__________________ -Peter Krause www.peterkrause.net www.gofasternow.com
"Combining the Art and Science of Driving Fast!"
Specializing in Professional, Private Driver Performance Evaluation and Optimization
Consultation Available Remotely and at VIRginia International Raceway
Use turn plates, create a math channel and use "steered angle" instead of "steering (wheel) angle."
Good thought; with some measurements I can create a calibration polynomial defining the relationship between actual wheel position and steering wheel position. This assumes the variable ratio is only dependant on wheel position and not speed (which I think is the case).
I don't have easy access to turn plates, but can just use a big protractor and get close enough.
Good thought; with some measurements I can create a calibration polynomial defining the relationship between actual wheel position and steering wheel position. This assumes the variable ratio is only dependant on wheel position and not speed (which I think is the case).
I don't have easy access to turn plates, but can just use a big protractor and get close enough.
Or.....take some data from a slow out-lap assuming no over/understeer, plot inferred calculated wheel position v. ECU reported wheel position and fit a polynomial. The curve even looks correct!
Going straight ahead, the ratio is 17.1:1 and becomes progressively more direct as the wheel is turned until the ratio has quickened to 13.7:1, for 2.6 turns lock-to-lock
I tried to measure sterring wheel position v. front wheel angle, but did not have an accurate enough protractor. I didn't realize that 90 degrees of steering wheel input only translates to maybe 10degrees of front wheel angle change.
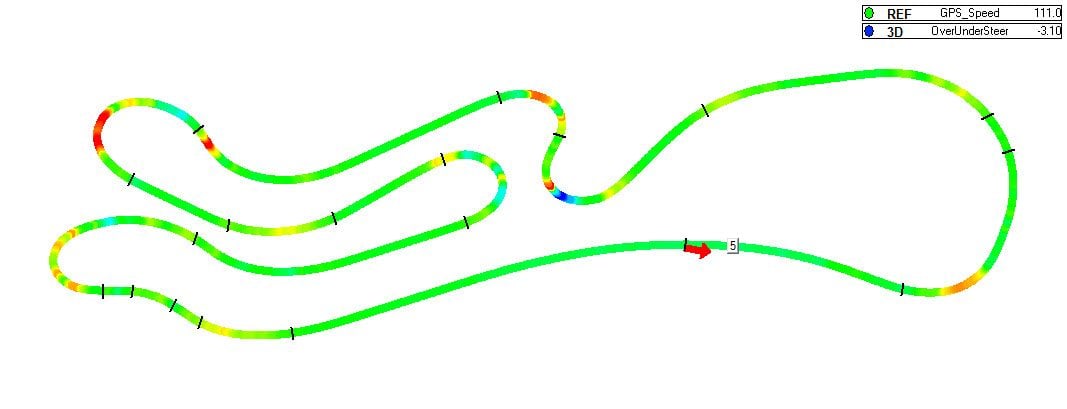
Nonetheless, I think my methodology above is valid in the use of an out-lap and curve fit to linearize the steering variable. Here's an application in an Oversteer (Red)/Understeer(blue) analysys at Palmer. I would have expected the oversteer into 1 and out of 5 and 7 as shown with some understeer into 4. Unsettled in the 11-12 complex. All makes sense. Really interesting and useful in addition to lateral acceleration measures (which are about equal in all the corners on the lap shown)
.
That's cool. I'll bet 90 degrees steering wheel angle is even less than 10 degrees steered angle. Maybe 7 degrees steered... The key is the visualization looks good and is as expected. Also, you can see the relative amplitude of each condition.
Nice job and thanks for sharing! I find this much more useful and valuable than strip charts.
It would be interesting to draw a parallel between throttle position and oversteer!
It would be interesting to draw a parallel between throttle position and oversteer!
Yup! I thought of that and already setup the measures graph! See below. Looks like I was not inducing oversteer with the throttle, but applied throttle as I exited the oversteer condition (likely through unwinding the wheel which we can see too on the graph).
Great visualizations. You can also take averages from your laps and then see how they compare after you make changes, tires wear, etc. It adds a lot to your understanding of the vehicle and it's sensitivities.
Great visualizations. You can also take averages from your laps and then see how they compare after you make changes, tires wear, etc. It adds a lot to your understanding of the vehicle and it's sensitivities.
Yup - the entry of T4 was really interesting to see the understeer as I was not taking the traditional outside in line and the visuals show it. For the visualized lap I was taking a straight line mainly straight and track right past the inside edge of the corner and braking straight cutting through the turn, then taking a sharper right hander to get setup to enter T5. This line seems much faster - slower but bypasses a lot of track.
This line seems much faster - slower but bypasses a lot of track.
I�d want to do a very detailed segment time analysis across a broad number of laps before coming to a conclusion as to whether this line approach contributed positively (or not) to the overall. �Shorter distance� can be a rabbit hole and small changes in vMin under a threshold and over a certain distance can really affect segment time more than anything else, in my experience.
 10-17-2017, 01:18 PM
10-17-2017, 01:18 PM