When you click on links to various merchants on this site and make a purchase, this can result in this site earning a commission. Affiliate programs and affiliations include, but are not limited to, the eBay Partner Network.
Finally got my steering angle string pot mounted (least problematic area, I hope it works). My question is...what sensor type to choose and how to calibrate it? The calibration is RS2 is not present is RS3 that I see. I first chose "Angular pot calib" and the calibrate routine basically had you go from one extreme to the other. I then changed it to "Angular pot autocal". When I calibrated that I had the steering angle straight ahead (as close to straight ahead as you can with the car on the lift and the rear suspension out) and it now has positive angles going one way and negative going the other way. I remember at the Aim seminar that Roger suggested calibrating the steering by turning 90 degrees one way and click and 90 degrees the other and click. Made sense as that was how I recalled it was done in RS2.
That is the way steering wheel angle (or vehicle steered angle, whichever way you want to do it) is expressed. Straight ahead is zero, left is - degrees, right is degrees. Sounds good to go to me, although I haven't tried the auto cal. You want center zero sensor, for sure.
__________________ -Peter Krause www.peterkrause.net www.gofasternow.com
"Combining the Art and Science of Driving Fast!"
Specializing in Professional, Private Driver Performance Evaluation and Optimization
Consultation Available Remotely and at VIRginia International Raceway
You also want to make a math channel that makes the steering wheel angle into the steered angle of the actual inside wheel. That is the number that many math channels need for under/oversteer.
You can find that angle pretty easy with out turn plates. Use a board against the wheel and draw a line on the floor when the wheel is straight. Then turn the steering wheel 90* and draw another line on the floor where the wheels are now pointed. Measure the difference and you can make your math channel.
What Matt is talking about is creating a vehicle "steered angle" channel, which is the actual number of degrees the front wheels turn off centerline for the multiple of degrees the steering wheel turns.
Most folks measure "steering wheel angle," which is the one-to-one measure of the driver's actual wheel input in degrees. This is the minimum most folks should log, but because of differences in rack ratios and speed, it's helpful to know both.
There are benefits to both. From a driver key performance indicator measure to a chassis engineering (oversteer/understeer, scrub radius, tracking tire degradation) measure, both are good to have, but at LEAST do the "steering wheel angle" so you can track that.
Correct. The steering wheel angle will give a basic measure of under/over steer when placed on a XY Plot with lateral G force. It should be a nice straight line. Most people people will see the ends start to curve, which is where the under/over steae starts.
For anyone who wants to know more and how to make the more involved steered wheel angle and more advanced measures of under/over steer, Bob Knox covers it extensively in his book
When people ask me what book to read after they get through with Chris Brown's squiggly lines book, it's ALWAYS Bob Knox's book.
I learned (and maybe Matt, too) how to create and read the XY plot to track how much US/OS there is in a car/driver combination, along with MANY other things, from John Block's excellent webinar series he holds several times a year online.
When people ask me what book to read after they get through with Chris Brown's squiggly lines book, it's ALWAYS Bob Knox's book.
I learned (and maybe Matt, too) how to create and read the XY plot to track how much US/OS there is in a car/driver combination, along with MANY other things, from John Block's excellent webinar series he holds several times a year online.
If you sign up, enter "gofasternow" so he can track where your came from. Here!
I think I saw it in Bob's book first, but it was a while ago! John's webinar series is TERRIFIC! For people who want more than a book, there is no better way to learn the math channels and the "engineering think" that John is so good at. Plus, how often do you get to learn from an engineer that put a car on pole at the Indy 500!
This math generates an expected steering trace I overlay with an actual steered wheel trace derived from the steering sensor. Great for determining oversteer/understeer. Steering sensor values are one of the most under utilized data signals in analysis.
.
This math generates an expected steering trace I overlay with an actual steered wheel trace derived from the steering sensor. Great for determining oversteer/understeer. Steering sensor values are one of the most under utilized data signals in analysis.
Very true! Lots of people don't realize they are driving around a slight push or oversteer. This is a great way for them to check and see what the car is doing.
Can you talk me thru this equation? I understand the wheel base needs to be inputed. I assume the "inverse inverse corner radius needs to be inputed but what is it? What do the other constants and math do?
y = asin(x) returns the Inverse Sine (sin-1) of the elements of x. The asin function operates element-wise on arrays. For real elements of x in the interval [-1,1], asin(x) returns values in the interval [-pi/2,pi/2]. For real elements of x outside the interval [-1,1] and for complex values of x, asin(x) returns complex values. All angles are in radians.
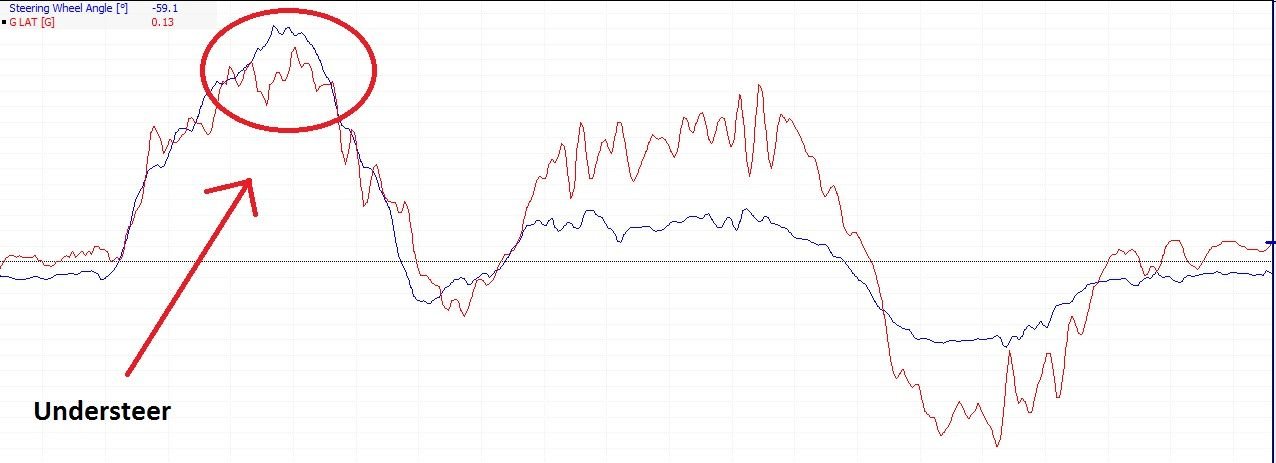
The vehicle wheelbase is a constant in my MoTeC math and can be whatever car you are working with. Inverse corner radius is also calculated from the math or G-Lat (m/s/s) / Speed ^2 (m/s). (25.4*12 converts mm to feet and 180 degrees divided by Pi to convert from radians to degrees. There may be different calculations you have seen to come up with the same result. Expected steering is very good channel to build as you can see from my screenshot. I know about what driver input it would take to accomplish the corner and any variance is oversteer or understeer. Another simple view is to take G Lateral force overlayed against steering input. If the steering trace keeps on climbing but G Lat has trailed off, understeer is evident.

 02-01-2015, 09:15 PM
02-01-2015, 09:15 PM